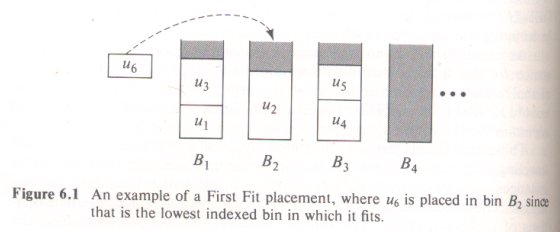
- Show the result of inserting the following strings into
a hash table using the given hash function values shown.
They should be inserted in the order given, using open
addressing to resolve collisions, and proceeding to the
next lower address on each collision:
hash(ralph)=8, hash(henry)=10, hash(wayne)=8,
hash(roger)=10, hash(hamish)=9, hash(hortense)=7.
[I gave credit to those who moved to higher addresses instead of lower ones. The question and its later parts still work in this case.]Index Key Hash addr 4 5 hortense 7 6 hamish 9 7 wayne 8 8 ralph 8 9 roger 10 10 henry 10 11 - What would happen if we deleted the entry for wayne? (That is, made it an empty entry, ready for a new insertion.) With "wayne" changed to an empty entry, the look up of "hamish" and "hortense" would fail (saying that these are not present when they are). It is possible to have a special "deleted" type that functions as an full entry for look up, and in that case, the above searches would not fail.
- What is wrong with the following hash function,
used for a hash table of size 50, where the keys
are character strings. (The s.charAt(0) will use the
Ascii code for the 0th character,
so there's nothing wrong with that.)
The worst thing about it is that it depends
only on the first and last character of the string.
In addition to summing all the characters, it would be better
to also use the parameter p as a multiplier.
int m = 50; // size of hash table public int hash(String s, int p, int m) { return (s.charAt(0) + s.charAt(s.length()-1))%m; }
- Give the algorithm that randomizes the order of the elements in an array. What is it's asymptotic (time) performance? This elegant algorithm is half-way through the material on the page Randomize an Array.
- What is the worst-case asymptotic (time) performance of quicksort? O(n2)
- Explain how you could use Part i above to improve the performance of quicksort. Randomize the array to be sorted using part i before invoking quicksort. What kind of time performance does this give? Average-case time performance of O(n*log(n)). The worst-case performance is still O(n2) What "awkward" input case(s) does this help with? For your text's initial quicksort algorithm, one example is an array already in sorted order. Reverse sorted order is another example. Does this step eliminate these cases altogether? No, because for example, it is possible that the randomization would yield sorted order. If not, then why and how does this step help? For large n this is of vanishing small probability.
- Explain how the same technique would eliminate some of the same "awkward" input cases if one used a binary search tree for sorting. Randomizing the order before inserting into a binary search tree yields on average a depth (or height) bounded by 2*n*log(n). Searching would be efficient in such a tree: O(n*log(n)). Also: how would you use a binary search tree for sorting? Insert the array to be sorted into the binary search tree. Then output with an inorder traversal. What kind of performance does this "tree sort" algorithm have?
- Your text's Randomized Quicksort is different from Parts i and iii above. Explain the additions to the quicksort algorithm that give Randomized Quicksort. In the step of quicksort that partitions from index p to index r, generate a random integer i from p to r inclusive. Exchange the pivot in position A[r] with the element in A[i]. Then do the regular partition.
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
- Is any problem in P (polynomial-time problems) also in NP? Yes. Using the "guessing-stage / checking-stage" definition of NP below, we see that a problem in P satisfies this definition without making use of the guessing-stage at all.
- Is P the same as NP? Can you prove this? Most researchers think now that P is a proper subset of NP, but no one has been able to prove this.
- Give the "guessing-stage / checking-stage" definition that
shows a problem is in NP.
NP is the class of problems solvable on a
nondeterministic computer.
A nondeterministic computer can carry out a nondeterministic algorithm.
Such an algorithm proceeds in two stages:
- Guessing stage: the algorithm "guesses" a structure S, which either is the answer to the problem or will help compute the answer.
- Checking stage: the computer proceeds in a normal deterministic fashion to use S in arriving at a Yes-No answer to the problem. The checking stage must be done in polynomial time. In effect S is the answer and the checking stage verifies in polynomial time that S is the answer.